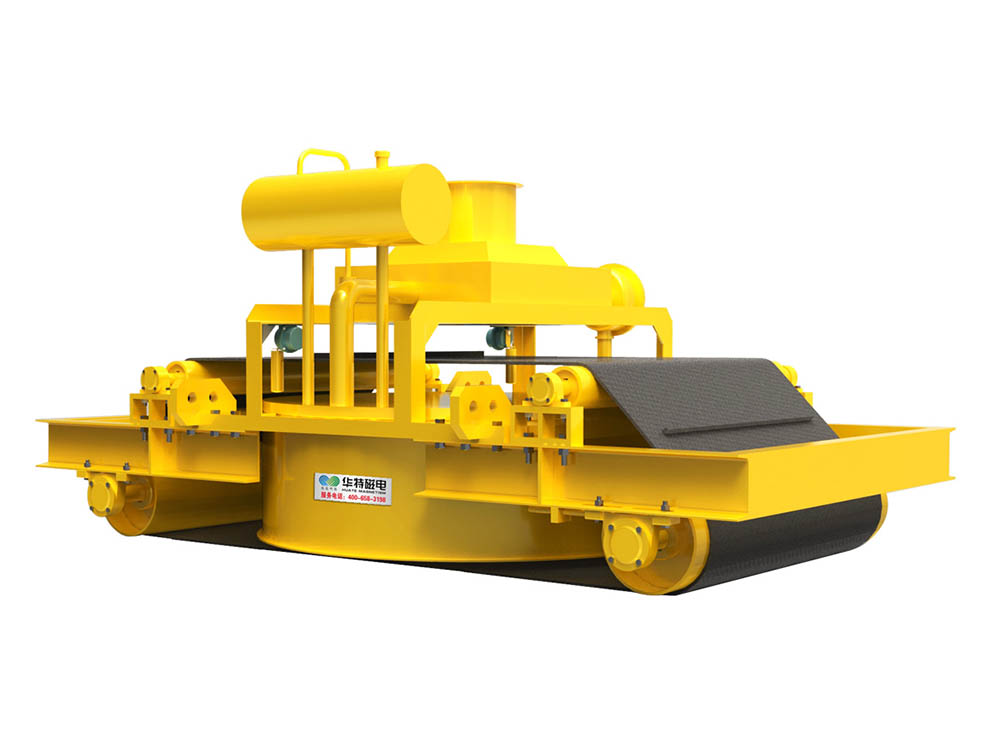
HPGM Силсилаи фишори баланди дастос Roll

Афзалиятҳои маҳсулот:
1. Тарҳрезии фишори доимӣ фишори ҳамворро дар байни ролҳо таъмин мекунад ва таъсири шикастанро таъмин мекунад.
2. Ислоҳи худкори инҳироф, метавонад зуд фосилаи ролро барои таъмини ҳамвории таҷҳизот танзим кунад.
3. Системаи ҷудокунии канори таъсири эффектҳои канориро ба таъсири шикастан коҳиш медиҳад.
4. Бо studs карбиди сементшуда, мӯҳлати хизмати дароз, нигоҳдории осон, ва ивазшаванда.
5. Бонки клапан ҷузъҳои воридшударо қабул мекунад ва системаи гидравликӣ тарҳи оқилона ва эътимоднокии хуб дорад.
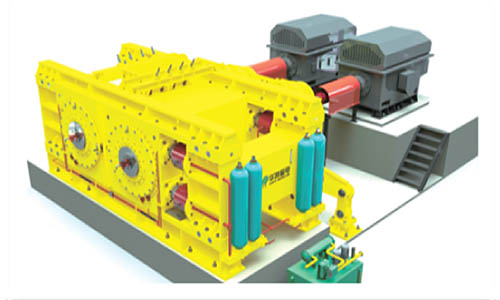
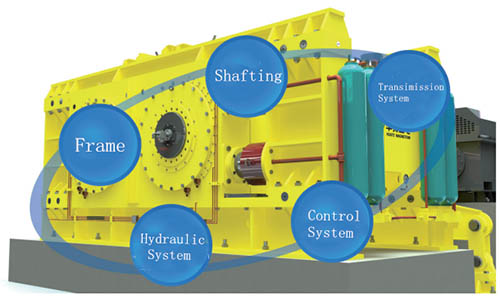
Хусусиятҳои сохтории HPGR:
1. Навъи нав технологияи рӯи рол љўѐн
Он дӯхтаҳои баландсифати хӯлаи сахтро бо сахтии баланд ва муқовимати хуби фарсудашавӣ қабул мекунад. Ҷойгиркунии шустушӯй тавассути симулятсияи компютерӣ тарҳрезӣ шудааст ва тартибот оқилона аст, ки метавонад як қабати ягонаи моддиро дар байни ҷӯйборҳо ташкил кунад, устухонҳо ва сатҳи ролро ба таври муассир муҳофизат кунад ва мӯҳлати хидматрасонии ролҳои фишурдашударо беҳтар созад. Асбобҳо бо илтиёмҳои махсуси воридотӣ барои иваз кардани осон насб карда мешаванд.
Маводи хом

Сатҳи баландсифати ба фарсудашавӣ тобовар бо дӯхтаҳо
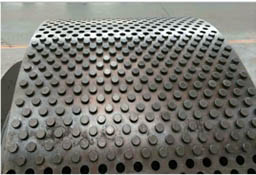
Пас аз истихроҷи мавод, дар сатҳи рол барои муҳофизат кардани сатҳи рол як қабати зиччи моддӣ ба вуҷуд меояд.
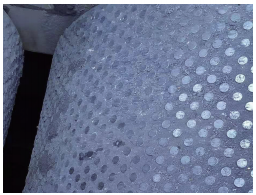
Торт моддӣ

Технологияи чудокунии втулка ва чохи асосй
Корпуси асосии рулони фишурдашуда аз пӯлоди хушсифати сохташуда ва втулка бо пулоди аълосифат сохта шудааст. Шакли асосй ва рулонхо аз материалхои гуногун сохта шудаанд, ки ин мустахкамии чохи асосй ва мустахкамии втулкахои рульро бехтар мекунад. Мухлати хизмати втулкахои шахта хеле бехтар гардид. Иваз кардани буттаи рол қулай аст.

Технологияи зуд васл кардан ва фуровардани подшипник
Подшипникҳои сӯрохии баландсифати конус қабул карда мешаванд ва зарфи равғани фишори баланд пешакӣ сохта мешаванд. Подшипникро тавассути насоси нафтии фишори баланд ба осонӣ ҷудо кардан мумкин аст, ки мушкилии иваз кардани подшипникро хеле кам мекунад ва самаранокии нигоҳдорӣ беҳтар мешавад.

Технологияи мӯҳргузории сершумор
Мӯҳри подшипник намудҳои гуногуни J-намуди плюс V-намуд ва мӯҳрҳои лабиринтро қабул мекунад ва технологияи мӯҳри омехта таъсири мӯҳри подшипникро самаранок таъмин мекунад.
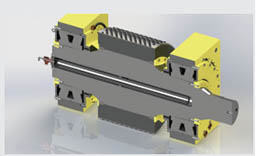
Чаҳорчӯбаи қувват баланд
Чаҳорчӯба бо пӯлоди конструктивии баландсифати карбон кафшер карда шудааст. Тамоми қувваи чаҳорчӯба ба таври сеченака бо қувваи баланд ва эътимоднокии хуб санҷида мешавад. Чаҳорчӯба ба воситаи annealing интегралӣ коркард ва деформатсияи чорчӯба хурд аст.

Сифати баланд ва боэътимоди системаи гидравликӣ
Мувофиқи хусусиятҳои майдакунии маводҳои гуногун, параметрҳои фишори системаи гидравликӣ оптимизатсия карда мешаванд ва махсусан барои хусусиятҳои майдакунии маъданҳои металлӣ ба монанди маъдани оҳан ва маъдани марганец тарҳи махсус қабул карда мешавад. Гурӯҳи клапанҳои гидравликӣ маҳсулоти бренди машҳури воридшударо қабул мекунад ва боэътимод ва устувор аст.

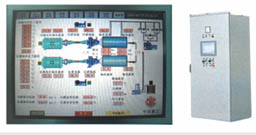
Системам автоматии идоракунй ва системаи молидании марказонидашуда
Бо Siemens PLC ва экрани пурраи сенсорӣ ва нақшаи умумии идоракунӣ, тамоми мошин метавонад беназорат бошад ва фишор ва параметрҳои гуногунро барои осон кардани майда кардани маъданҳои гуногун ба осонӣ тағир додан мумкин аст. Тамоми мошин системаи мутамаркази молиданиро қабул мекунад, ки метавонад миқдори молиданӣ ва басомадро бо шароити корӣ танзим кунад.
Ҳолатҳои лоиҳаи HPGR: